Package lejos.robotics
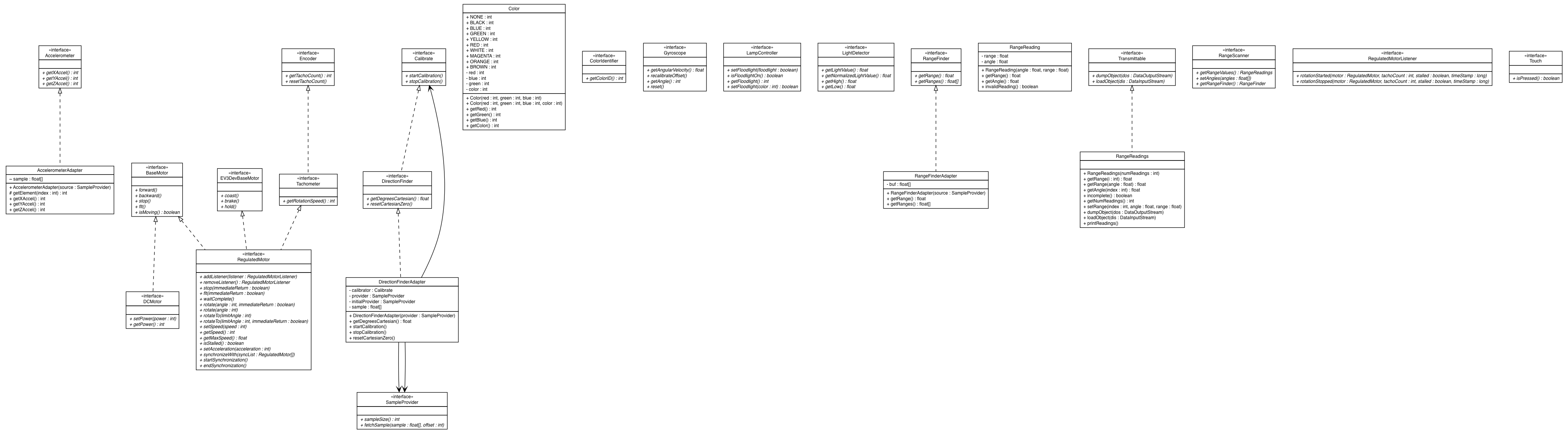
Hardware abstraction interfaces for the robotics package.
See: Description
| Interface | Description |
|---|---|
| Accelerometer |
Interface for Acceleration sensors
|
| BaseMotor |
Base motors interface.
|
| Calibrate | |
| ColorIdentifier | |
| DCMotor |
Interface for a regular DC motors.
|
| DirectionFinder |
Abstraction for compasses and other devices than return the heading of a robot.
|
| Encoder |
Abstraction for the tachometer built into NXT motors.
|
| EV3DevBaseMotor | |
| Gyroscope |
Abstraction for Gyroscope defines minimal implementation
|
| LampController |
Interface for a light sensors that also includes a lamp (usually LED) to provide illumination.
|
| LightDetector |
A platform independent implementation for sensors that can detect white light levels.
|
| RangeFinder |
Abstraction for a range finder sensor that returns the distance to the nearest object
|
| RangeScanner |
Abstraction for a single range scanning sensor, rotating platform with a range finder,
or a complete robot, that obtains a set of range readings at a set of angles to#
the robot's heading.
|
| RegulatedMotor |
Interface for encoded motors without limited range of movement (e.g.
|
| RegulatedMotorListener |
This interface defines a listener that is notified of the tachometer when the motor starts and stops rotating.
|
| SampleProvider |
Abstraction for classes that fetch samples from a sensors and classes that are able to process samples.
A sample is a measurement taken by a sensors at a single moment in time. |
| Tachometer |
Abstraction for a Tachometer, which monitors speed of the encoder.
|
| Touch |
Abstraction for touch sensors
|
| Transmittable |
| Class | Description |
|---|---|
| AccelerometerAdapter | |
| Color |
Representation of a color, used by color sensors and color detectors.
|
| DirectionFinderAdapter | |
| RangeFinderAdapter | |
| RangeReading |
Represent a single range reading
|
| RangeReadings |
Represents a set of range readings.
|