Package lejos.robotics
Interface Gyroscope
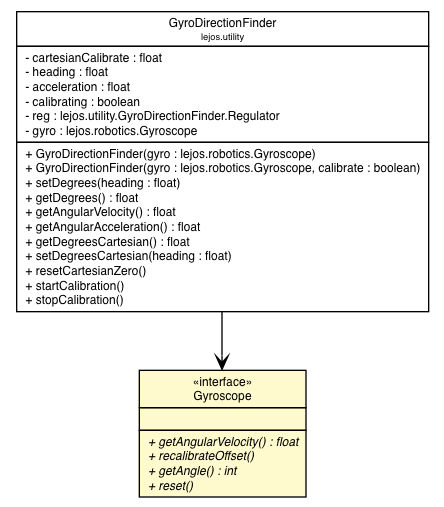
public interface Gyroscope
| Modifier and Type | Method and Description |
|---|---|
int |
getAngle() |
float |
getAngularVelocity()
Implementor must calculate and return the angular velocity in degrees per second.
|
void |
recalibrateOffset()
Implementor must calculate and set the offset/bias value for use in
getAngularVelocity(). |
void |
reset() |
float getAngularVelocity()
void recalibrateOffset()
getAngularVelocity().int getAngle()
void reset()