Package ev3dev.sensors.slamtec
Class RPLidarA1Driver
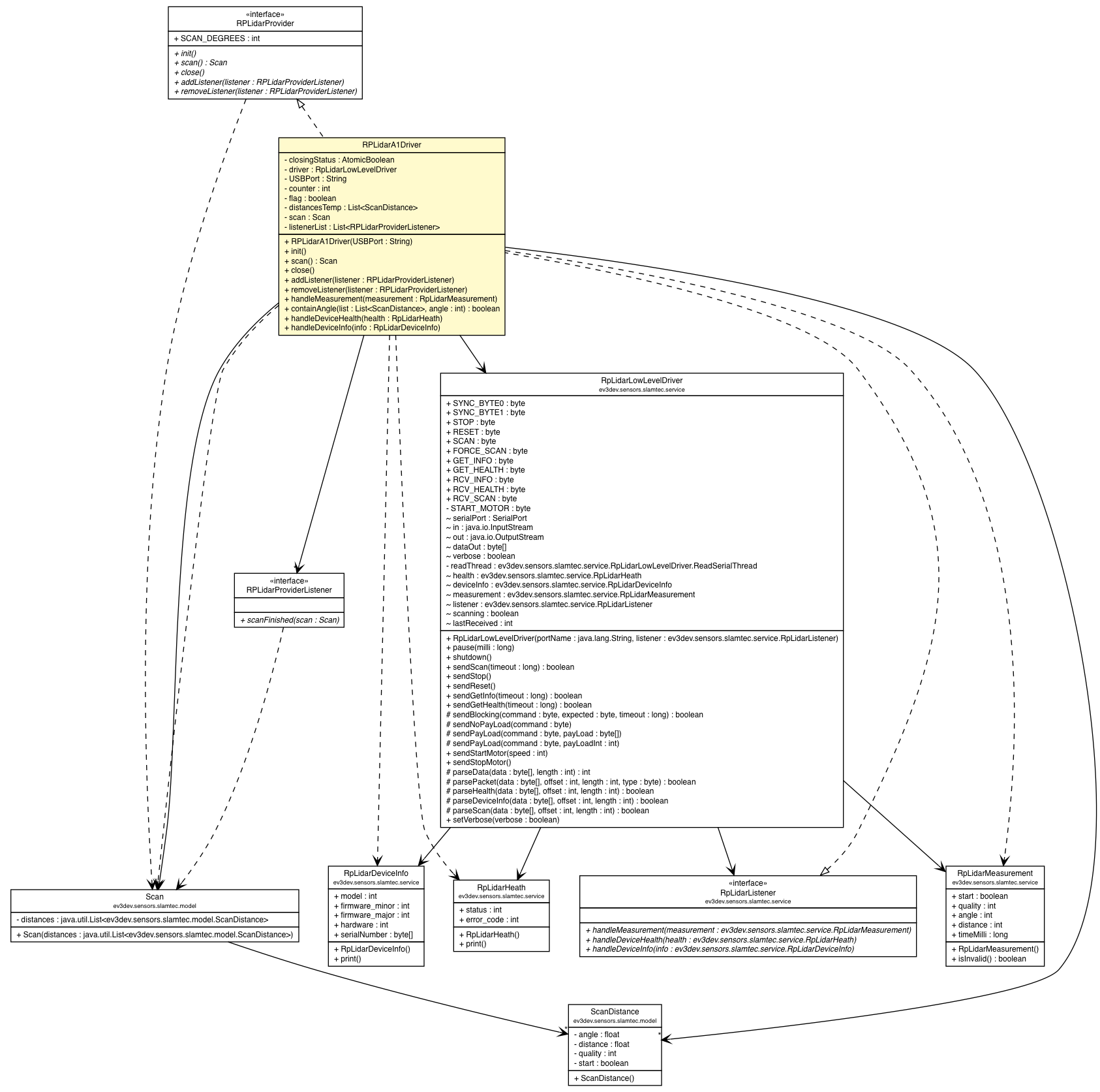
class RPLidarA1Driver extends java.lang.Object implements RPLidarProvider, RpLidarListener
| Modifier and Type | Field and Description |
|---|---|
private java.util.concurrent.atomic.AtomicBoolean |
closingStatus |
private int |
counter |
private java.util.List<ScanDistance> |
distancesTemp |
private RpLidarLowLevelDriver |
driver |
private boolean |
flag |
private java.util.List<RPLidarProviderListener> |
listenerList |
private Scan |
scan |
private java.lang.String |
USBPort |
SCAN_DEGREES| Constructor and Description |
|---|
RPLidarA1Driver(java.lang.String USBPort) |
| Modifier and Type | Method and Description |
|---|---|
void |
addListener(RPLidarProviderListener listener) |
void |
close() |
boolean |
containAngle(java.util.List<ScanDistance> list,
int angle) |
void |
handleDeviceHealth(RpLidarHeath health) |
void |
handleDeviceInfo(RpLidarDeviceInfo info) |
void |
handleMeasurement(RpLidarMeasurement measurement) |
void |
init() |
void |
removeListener(RPLidarProviderListener listener) |
Scan |
scan() |
private java.util.concurrent.atomic.AtomicBoolean closingStatus
private RpLidarLowLevelDriver driver
private final java.lang.String USBPort
private int counter
private boolean flag
private java.util.List<ScanDistance> distancesTemp
private Scan scan
private final java.util.List<RPLidarProviderListener> listenerList
public void init()
throws RPLidarA1ServiceException
init in interface RPLidarProviderRPLidarA1ServiceExceptionpublic Scan scan() throws RPLidarA1ServiceException
scan in interface RPLidarProviderRPLidarA1ServiceExceptionpublic void close()
throws RPLidarA1ServiceException
close in interface RPLidarProviderRPLidarA1ServiceExceptionpublic void addListener(RPLidarProviderListener listener)
addListener in interface RPLidarProviderpublic void removeListener(RPLidarProviderListener listener)
removeListener in interface RPLidarProviderpublic void handleMeasurement(RpLidarMeasurement measurement)
handleMeasurement in interface RpLidarListenerpublic boolean containAngle(java.util.List<ScanDistance> list, int angle)
public void handleDeviceHealth(RpLidarHeath health)
handleDeviceHealth in interface RpLidarListenerpublic void handleDeviceInfo(RpLidarDeviceInfo info)
handleDeviceInfo in interface RpLidarListener