Package ev3dev.sensors.slamtec.service
Class RpLidarHighLevelDriver
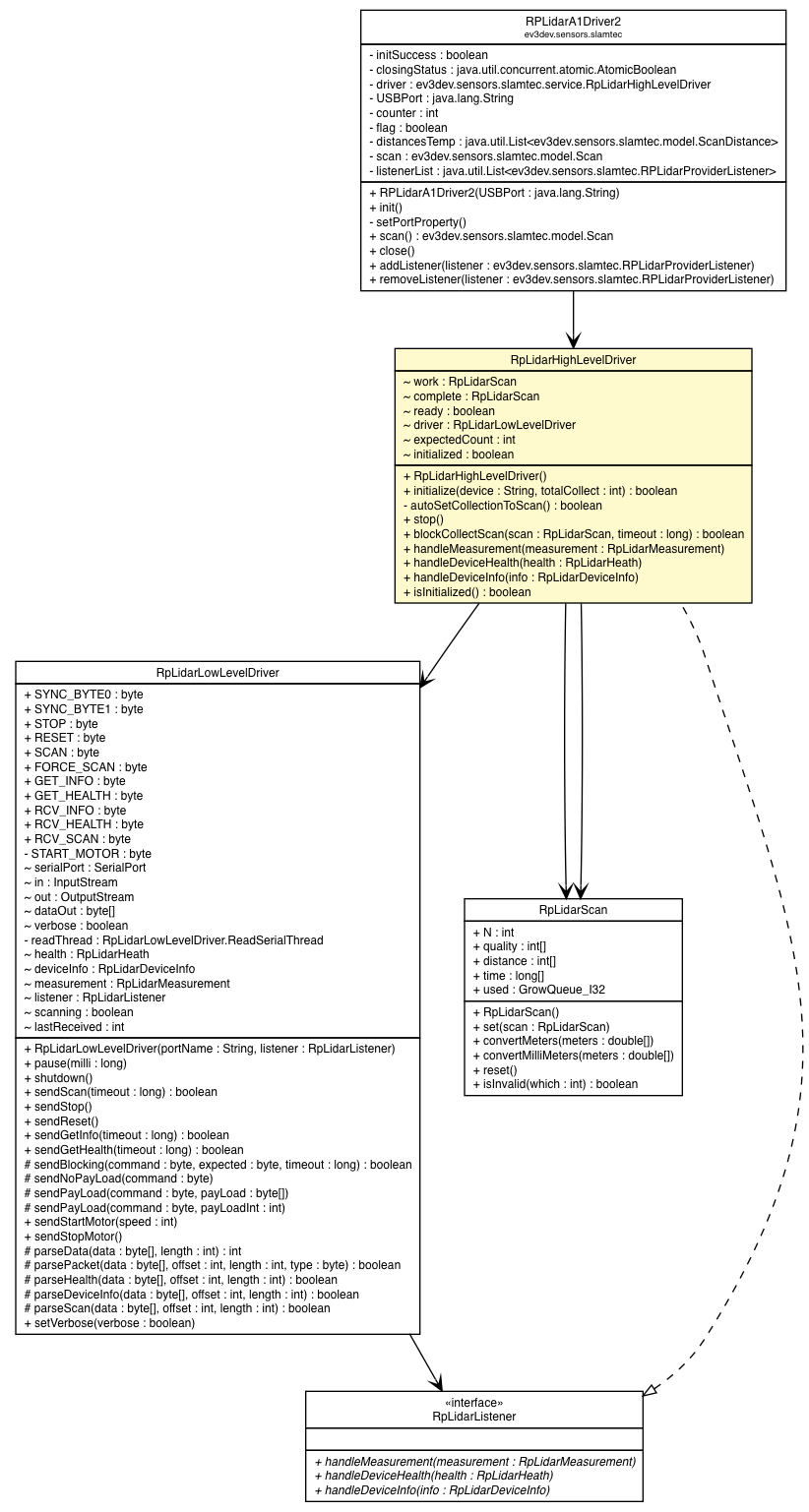
public class RpLidarHighLevelDriver extends java.lang.Object implements RpLidarListener
| Modifier and Type | Field and Description |
|---|---|
(package private) RpLidarScan |
complete |
(package private) RpLidarLowLevelDriver |
driver |
(package private) int |
expectedCount |
(package private) boolean |
initialized |
(package private) boolean |
ready |
(package private) RpLidarScan |
work |
| Constructor and Description |
|---|
RpLidarHighLevelDriver() |
| Modifier and Type | Method and Description |
|---|---|
private boolean |
autoSetCollectionToScan()
Determine the number of measurements it needs to collect to approximately read in an entire scan using
|
boolean |
blockCollectScan(RpLidarScan scan,
long timeout)
Returns the most recent complete scan which has been returned by this function.
|
void |
handleDeviceHealth(RpLidarHeath health) |
void |
handleDeviceInfo(RpLidarDeviceInfo info) |
void |
handleMeasurement(RpLidarMeasurement measurement) |
boolean |
initialize(java.lang.String device,
int totalCollect)
Connects to the LIDAR
|
boolean |
isInitialized() |
void |
stop()
Disconnects and shuts down the connection to the LIDAR
|
final RpLidarScan work
final RpLidarScan complete
volatile boolean ready
RpLidarLowLevelDriver driver
int expectedCount
volatile boolean initialized
public boolean initialize(java.lang.String device,
int totalCollect)
device - Which device the lidar is connected tototalCollect - How many measurements should it collect in a single scan. If <= 0 it will automatically
determine the number in a complete scan and use that.private boolean autoSetCollectionToScan()
public void stop()
public boolean blockCollectScan(RpLidarScan scan, long timeout)
scan - (output) Where the complete scan is written totimeout - If > 0 then it will wait at most that amount of time for a complete scanpublic void handleMeasurement(RpLidarMeasurement measurement)
handleMeasurement in interface RpLidarListenerpublic void handleDeviceHealth(RpLidarHeath health)
handleDeviceHealth in interface RpLidarListenerpublic void handleDeviceInfo(RpLidarDeviceInfo info)
handleDeviceInfo in interface RpLidarListenerpublic boolean isInitialized()