Package lejos.robotics.navigation
Navigation classes.
See: Description
| Interface | Description |
|---|---|
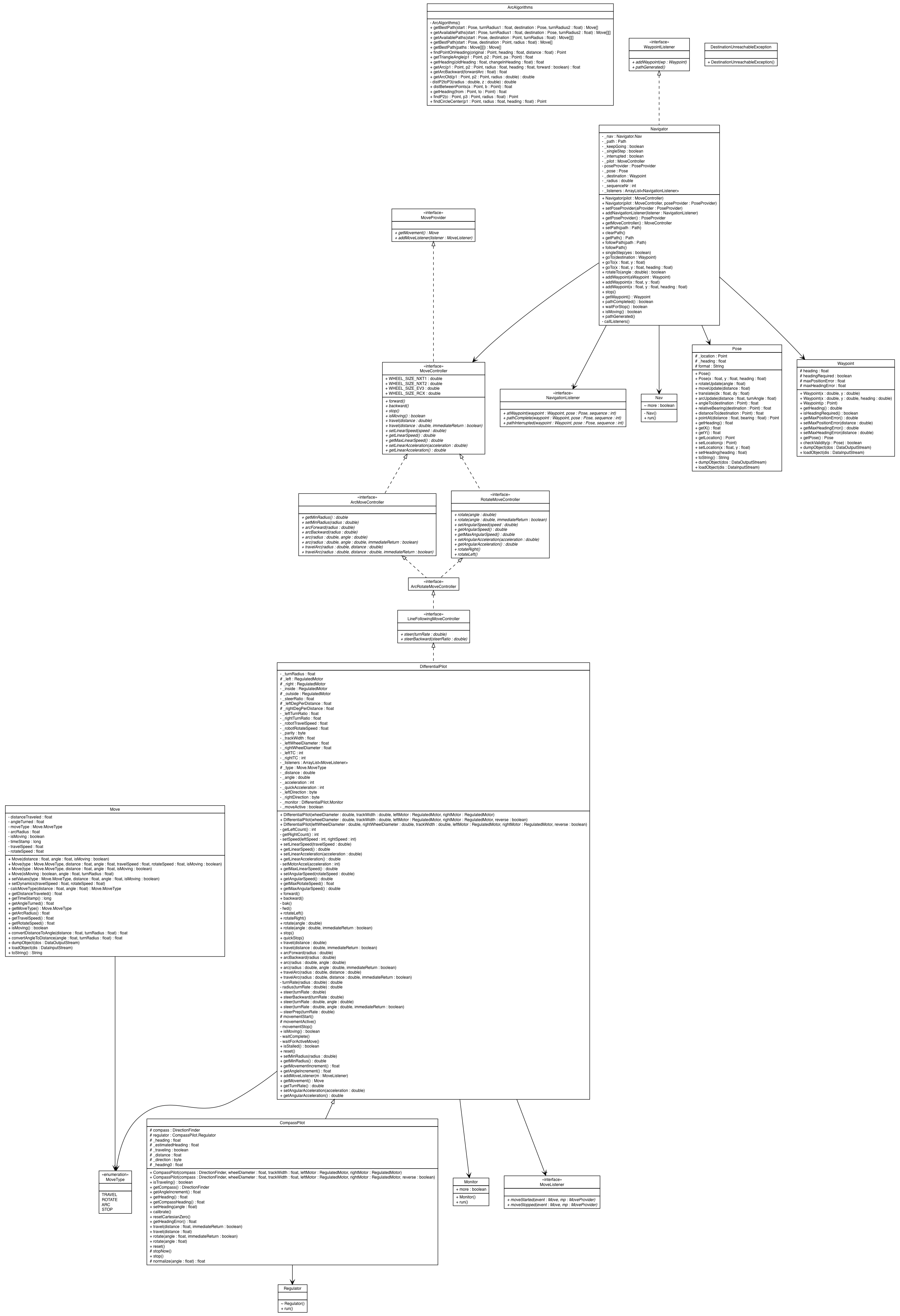
| ArcMoveController |
An enhanced MoveController that is capable of traveling in arcs.
|
| ArcRotateMoveController |
A MoveController for robots that can perform arcs and rotate on the spot.
|
| LineFollowingMoveController | |
| MoveController | |
| MoveListener |
Any class that wants to be updated automatically by a MoveProvider should
implement this interface.
|
| MoveProvider |
Should be implemented by a Pilot that provides a partial movement to a pose
when requested.
|
| NavigationListener |
Interface for informing listeners that a way point has been reached.
|
| RotateMoveController | |
| WaypointListener |
Interface for informing listeners that a way point has been generated.
|
| Class | Description |
|---|---|
| ArcAlgorithms |
The static methods in this class can be used to to calculate theoretical routes and for displaying graphical representations of
the path of a robot.
|
| CompassPilot |
A Pilot that keeps track of direction using a DirectionFinder.
|
| DifferentialPilot |
The DifferentialPilot class is a software abstraction of the Pilot mechanism
of a NXT robot.
|
| Move |
Models a movement performed by a pilot
|
| Navigator |
This class controls a robot to traverse a Path, a sequence of
Waypoints. |
| Pose |
Represents the location and heading(direction angle) of a robot.
This class includes methods for updating the Pose to in response to basic robot movements. |
| Waypoint |
A sequence of way points make up a route that a robot can navigate.
|
| Enum | Description |
|---|---|
| Move.MoveType |
The type of movement made in sufficient detail to allow errors
in the movement to be modeled.
|
| Exception | Description |
|---|---|
| DestinationUnreachableException |
Exception thrown by path finders when the destination cannot be reached
|