Package lejos.robotics.navigation
Class DifferentialPilot
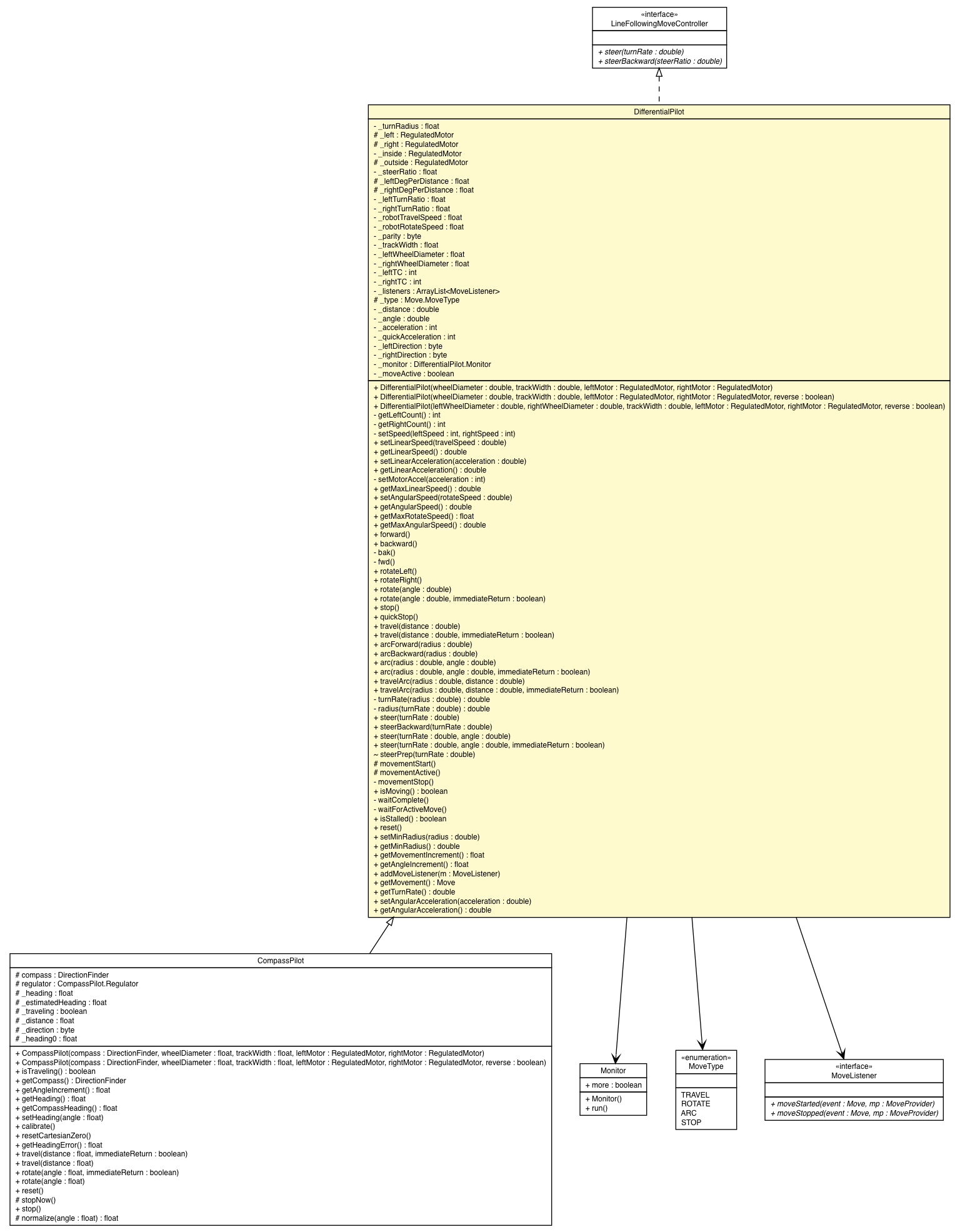
public class DifferentialPilot extends java.lang.Object implements LineFollowingMoveController
RegulatedMotorListener with
each of its motors. An object of this class assumes that it has exclusive
control of its motors. If any other object makes calls to its motors, the
results are unpredictable. OdometryPoseProvider which has called the
addMoveListener method on this object.stop().isStalled() returns
true , isMoving() returns false,
moveStopped()
is called, and, if a blocking method is executing, that method exits.
The units of measure for travel distance, speed and acceleration are the
units used in specifying the wheel diameter and track width in the
constructor.
DifferentialPilot pilot = new DifferentialPilot(2.1f, 4.4f, Motor.A, Motor.C, true); // parameters in inches
pilot.setRobotSpeed(30); // cm per second
pilot.travel(50); // cm
pilot.rotate(-90); // degree clockwise
pilot.travel(-50,true); // move backward for 50 cm
while(pilot.isMoving())Thread.yield();
pilot.rotate(-90);
pilot.rotateTo(270);
pilot.steer(-50,180,true); // turn 180 degrees to the right
waitComplete(); // returns when previous method is complete
pilot.steer(100); // turns with left wheel stationary
Delay.msDelay(1000;
pilot.stop();
Note: A DifferentialPilot robot can simulate a SteeringPilot robot by calling DifferentialPilot.setMinRadius() and setting the value to something greater than zero (perhaps 15 cm).
| Modifier and Type | Class and Description |
|---|---|
private class |
DifferentialPilot.Monitor |
| Modifier and Type | Field and Description |
|---|---|
private int |
_acceleration
used by travel and rotate methods, and stop()
|
private double |
_angle
Angle about to turn - used by movementStopped
|
private double |
_distance
Distance about to travel - used by movementStarted
|
private RegulatedMotor |
_inside
The motor at the inside of the turn.
|
protected RegulatedMotor |
_left
Left motor..
|
protected float |
_leftDegPerDistance
Left motor degrees per unit of travel.
|
private byte |
_leftDirection
direction of rotation of left motor +1 or -1
|
private int |
_leftTC |
private float |
_leftTurnRatio
Left motor revolutions for 360 degree rotation of robot (motors running
in opposite directions).
|
private float |
_leftWheelDiameter
Diameter of left wheel.
|
private java.util.ArrayList<MoveListener> |
_listeners |
private DifferentialPilot.Monitor |
_monitor
The monitor thread
|
private boolean |
_moveActive
set by rotatsionStopped() used by Monitor thread to call
movementStopped()
|
protected RegulatedMotor |
_outside
The motor at the outside of the turn.
|
private byte |
_parity
Motor rotation forward makes robot move forward if parity == 1.
|
private int |
_quickAcceleration |
protected RegulatedMotor |
_right
Right motor.
|
protected float |
_rightDegPerDistance
Right motor degrees per unit of travel.
|
private byte |
_rightDirection
direction of rotation of right motor +1 or -1
|
private int |
_rightTC |
private float |
_rightTurnRatio
Right motor revolutions for 360 degree rotation of robot (motors running
in opposite directions).
|
private float |
_rightWheelDiameter
Diameter of right wheel.
|
private float |
_robotRotateSpeed
Speed of robot for turning in degree per seconds.
|
private float |
_robotTravelSpeed
Speed of robot for moving in wheel diameter units per seconds.
|
private float |
_steerRatio
ratio of inside/outside motor speeds set by steer(turnRate) used by other
steer methods;
|
private float |
_trackWidth
Distance between wheels.
|
private float |
_turnRadius |
protected Move.MoveType |
_type |
WHEEL_SIZE_EV3, WHEEL_SIZE_NXT1, WHEEL_SIZE_NXT2, WHEEL_SIZE_RCX| Constructor and Description |
|---|
DifferentialPilot(double leftWheelDiameter,
double rightWheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor,
boolean reverse)
Allocates a DifferentialPilot object, and sets the physical parameters of
the NXT robot.
|
DifferentialPilot(double wheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor)
Allocates a DifferentialPilot object, and sets the physical parameters of
the NXT robot.
Assumes Motor.forward() causes the robot to move forward. |
DifferentialPilot(double wheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor,
boolean reverse)
Allocates a DifferentialPilot object, and sets the physical parameters of
the NXT robot.
|
| Modifier and Type | Method and Description |
|---|---|
void |
addMoveListener(MoveListener m)
Adds a MoveListener that will be notified of all movement events.
|
void |
arc(double radius,
double angle)
Moves the NXT robot along an arc with a specified radius and angle,
after which the robot stops moving.
|
void |
arc(double radius,
double angle,
boolean immediateReturn)
Moves the NXT robot along an arc with a specified radius and angle,
after which the robot stops moving.
|
void |
arcBackward(double radius)
Starts the NXT robot moving backward along an arc with a specified radius.
|
void |
arcForward(double radius)
Starts the NXT robot moving forward along an arc with a specified radius.
|
void |
backward()
Starts the NXT robot moving backward.
|
private void |
bak()
Motors backward.
|
void |
forward()
Starts the NXT robot moving forward.
|
private void |
fwd()
Motors forward.
|
float |
getAngleIncrement() |
double |
getAngularAcceleration()
Returns the acceleration at which the robot accelerates at the start of a move and decelerates at the end of a move.
|
double |
getAngularSpeed()
Returns the value of the rotation speed
|
private int |
getLeftCount()
Returns the tachoCount of the left motor
|
double |
getLinearAcceleration()
Returns the acceleration at which the robot accelerates at the start of a move and decelerates at the end of a move.
|
double |
getLinearSpeed()
Returns the speed at which the robot will travel forward and backward (and to some extent arcs, although actual arc speed
is slightly less).
|
double |
getMaxAngularSpeed()
returns the maximum value of the rotation speed;
|
double |
getMaxLinearSpeed()
Returns the maximum speed at which this robot is capable of traveling forward and backward.
|
float |
getMaxRotateSpeed() |
double |
getMinRadius()
The minimum steering radius this vehicle is capable of when traveling in an arc.
|
Move |
getMovement()
Returns the move made since the move started, but before it has completed.
|
float |
getMovementIncrement() |
private int |
getRightCount()
Returns the tachoCount of the right motor
|
double |
getTurnRate()
Get the turn rate for arc and steer commands
|
boolean |
isMoving()
true if the robot is moving
|
boolean |
isStalled() |
protected void |
movementActive()
Called to indicate that the motors are now running and should be monitored for movement.
|
protected void |
movementStart()
called at start of a movement to inform the listeners that a movement has
started.
|
private void |
movementStop()
called by Arc() ,travel(),rotate(),stop() rotationStopped() calls
moveStopped on listener
|
void |
quickStop()
Stops the robot almost immediately.
|
private double |
radius(double turnRate)
Returns the radius of the turn made by steer(turnRate) Used in for
planned distance at start of arc and steer moves.
|
void |
reset()
Resets tacho count for both motors.
|
void |
rotate(double angle)
Rotates the NXT robot through a specific angle.
|
void |
rotate(double angle,
boolean immediateReturn)
Rotates the NXT robot through a specific angle.
|
void |
rotateLeft() |
void |
rotateRight() |
void |
setAngularAcceleration(double acceleration)
Sets the acceleration at which the robot will accelerate at the start of a move and decelerate at the end of a move.
|
void |
setAngularSpeed(double rotateSpeed)
sets the rotation speed of the vehicle, degrees per second
|
void |
setLinearAcceleration(double acceleration)
Sets the acceleration at which the robot will accelerate at the start of a move and decelerate at the end of a move.
|
void |
setLinearSpeed(double travelSpeed)
set travel speed in wheel diameter units per second
|
void |
setMinRadius(double radius)
Set the radius of the minimum turning circle.
|
private void |
setMotorAccel(int acceleration)
helper method for setAcceleration and quickStop
|
private void |
setSpeed(int leftSpeed,
int rightSpeed) |
void |
steer(double turnRate)
Starts the robot moving forward along a curved path.
|
void |
steer(double turnRate,
double angle)
Moves the robot along a curved path through a specified turn angle.
|
void |
steer(double turnRate,
double angle,
boolean immediateReturn)
Moves the robot along a curved path for a specified angle of rotation.
|
void |
steerBackward(double turnRate)
Starts the robot moving backward along a curved path.
|
(package private) void |
steerPrep(double turnRate)
helper method used by steer(float) and steer(float,float,boolean) sets
_outsideSpeed, _insideSpeed, _steerRatio set motor acceleration to help
continuous steer and arc moves
|
void |
stop()
Stops the NXT robot.
|
void |
travel(double distance)
Moves the NXT robot a specific distance in an (hopefully) straight line.
A positive distance causes forward motion, a negative distance moves backward. |
void |
travel(double distance,
boolean immediateReturn)
Moves the NXT robot a specific distance in an (hopefully) straight line.
A positive distance causes forward motion, a negative distance moves backward. |
void |
travelArc(double radius,
double distance)
Moves the NXT robot a specified distance along an arc of specified radius,
after which the robot stops moving.
|
void |
travelArc(double radius,
double distance,
boolean immediateReturn)
Moves the NXT robot a specified distance along an arc of specified radius,
after which the robot stops moving.
|
private double |
turnRate(double radius)
Calculates the turn rate corresponding to the turn radius;
use as the parameter for steer() negative argument means center of turn is on right, so angle of turn is negative |
private void |
waitComplete()
wait for the current operation on both motors to complete
|
private void |
waitForActiveMove() |
private float _turnRadius
protected final RegulatedMotor _left
protected final RegulatedMotor _right
private RegulatedMotor _inside
protected RegulatedMotor _outside
private float _steerRatio
protected final float _leftDegPerDistance
protected final float _rightDegPerDistance
private final float _leftTurnRatio
private final float _rightTurnRatio
private float _robotTravelSpeed
private float _robotRotateSpeed
private byte _parity
private final float _trackWidth
private final float _leftWheelDiameter
private final float _rightWheelDiameter
private int _leftTC
private int _rightTC
private java.util.ArrayList<MoveListener> _listeners
protected Move.MoveType _type
private double _distance
private double _angle
private int _acceleration
private int _quickAcceleration
private byte _leftDirection
private byte _rightDirection
private DifferentialPilot.Monitor _monitor
private boolean _moveActive
public DifferentialPilot(double wheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor)
wheelDiameter - Diameter of the tire, in any convenient units (diameter in mm
is usually printed on the tire).trackWidth - Distance between center of right tire and center of left tire,
in same units as wheelDiameter.leftMotor - The left Motor (e.g., Motor.C).rightMotor - The right Motor (e.g., Motor.A).public DifferentialPilot(double wheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor,
boolean reverse)
wheelDiameter - Diameter of the tire, in any convenient units (diameter in mm
is usually printed on the tire).trackWidth - Distance between center of right tire and center of left tire,
in same units as wheelDiameter.leftMotor - The left Motor (e.g., Motor.C).rightMotor - The right Motor (e.g., Motor.A).reverse - If true, the NXT robot moves forward when the motors are
running backward.public DifferentialPilot(double leftWheelDiameter,
double rightWheelDiameter,
double trackWidth,
RegulatedMotor leftMotor,
RegulatedMotor rightMotor,
boolean reverse)
leftWheelDiameter - Diameter of the left wheel, in any convenient units (diameter
in mm is usually printed on the tire).rightWheelDiameter - Diameter of the right wheel. You can actually fit
intentionally wheels with different size to your robot. If you
fitted wheels with the same size, but your robot is not going
straight, try swapping the wheels and see if it deviates into
the other direction. That would indicate a small difference in
wheel size. Adjust wheel size accordingly. The minimum change
in wheel size which will actually have an effect is given by
minChange = A*wheelDiameter*wheelDiameter/(1-(A*wheelDiameter)
where A = PI/(moveSpeed*360). Thus for a moveSpeed of 25
cm/second and a wheelDiameter of 5,5 cm the minChange is about
0,01058 cm. The reason for this is, that different while sizes
will result in different motor speed. And that is given as an
integer in degree per second.trackWidth - Distance between center of right tire and center of left tire,
in same units as wheelDiameter.leftMotor - The left Motor (e.g., Motor.C).rightMotor - The right Motor (e.g., Motor.A).reverse - If true, the NXT robot moves forward when the motors are
running backward.private int getLeftCount()
private int getRightCount()
private void setSpeed(int leftSpeed,
int rightSpeed)
public void setLinearSpeed(double travelSpeed)
setLinearSpeed in interface MoveControllertravelSpeed - : speed in distance (wheel diameter)units/secpublic double getLinearSpeed()
MoveControllergetLinearSpeed in interface MoveControllerpublic void setLinearAcceleration(double acceleration)
MoveControllerIf acceleration is set during a move it will not be in used for the current move, it will be in effect with the next move.
setLinearAcceleration in interface MoveControlleracceleration - in chosen units/second^2public double getLinearAcceleration()
MoveControllergetLinearAcceleration in interface MoveControllerprivate void setMotorAccel(int acceleration)
acceleration - public double getMaxLinearSpeed()
MoveControllergetMaxLinearSpeed in interface MoveControllerpublic void setAngularSpeed(double rotateSpeed)
setAngularSpeed in interface RotateMoveControllerrotateSpeed - public double getAngularSpeed()
RotateMoveControllergetAngularSpeed in interface RotateMoveControllerpublic float getMaxRotateSpeed()
public double getMaxAngularSpeed()
RotateMoveControllergetMaxAngularSpeed in interface RotateMoveControllerpublic void forward()
forward in interface MoveControllerpublic void backward()
backward in interface MoveControllerprivate void bak()
private void fwd()
public void rotateLeft()
rotateLeft in interface RotateMoveControllerpublic void rotateRight()
rotateRight in interface RotateMoveControllerpublic void rotate(double angle)
rotate in interface RotateMoveControllerangle - The wanted angle of rotation in degrees. Positive angle rotate
left (anti-clockwise), negative right.public void rotate(double angle,
boolean immediateReturn)
rotate in interface RotateMoveControllerangle - The wanted angle of rotation in degrees. Positive angle rotate
left (anti-clockwise), negative right.immediateReturn - If true this method returns immediately.public void stop()
stop in interface MoveControllerpublic void quickStop()
stop() is too slow;public void travel(double distance)
travel in interface MoveControllerdistance - The distance to move. Unit of measure for distance must be
same as wheelDiameter and trackWidth.public void travel(double distance,
boolean immediateReturn)
travel in interface MoveControllerdistance - The distance to move. Unit of measure for distance must be
same as wheelDiameter and trackWidth.immediateReturn - If true this method returns immediately.public void arcForward(double radius)
ArcMoveController
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
arcForward in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.public void arcBackward(double radius)
ArcMoveController
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
arcBackward in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.public void arc(double radius,
double angle)
ArcMoveControllerangle degrees along the arc.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, is zero, the robot rotates in place.
Robot will stop when the degrees it has moved along the arc equals angle.
If angle is positive, the robot will turn to the left (anti-clockwise).
If angle is negative, the robot will turn to the right (clockwise).
If angle is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
arc in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.angle - The sign of the angle determines the direction of the robot turns: Positive is anti-clockwise, negative is clockwise.ArcMoveController.travelArc(double, double)public void arc(double radius,
double angle,
boolean immediateReturn)
ArcMoveControllerimmediateReturn parameter.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, is zero, the robot rotates in place.
The robot will stop when the degrees it has moved along the arc equals angle.
If angle is positive, the robot will turn to the left (anti-clockwise).
If angle is negative, the robot will turn to the right (clockwise).
If angle is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
arc in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.angle - The sign of the angle determines the direction of the robot turns: Positive is anti-clockwise, negative is clockwise.immediateReturn - If immediateReturn is true then the method returns immediately.ArcMoveController.travelArc(double, double, boolean)public void travelArc(double radius,
double distance)
ArcMoveControllerdistance along the arc. The units (inches, cm) for distance
must be the same as the units used for radius.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place
The robot will stop when it has moved along the arc distance units.
If distance is positive, the robot will move travel forwards.
If distance is negative, the robot will move travel backwards.
If distance is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
travelArc in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.distance - to travel, in same units as radius. The sign of the distance determines the direction of robot motion. Positive drives the robot forward, negative drives it backward.ArcMoveController.arc(double, double)public void travelArc(double radius,
double distance,
boolean immediateReturn)
ArcMoveControllerimmediateReturn parameter.
The units (inches, cm) for distance should be the same as the units used for radius.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
The robot will stop when it has moved along the arc distance units.
If distance is positive, the robot will move travel forwards.
If distance is negative, the robot will move travel backwards.
If distance is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
travelArc in interface ArcMoveControllerradius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.distance - to travel, in same units as radius. The sign of the distance determines the direction of robot motion. Positive drives the robot forward, negative drives it backward.immediateReturn - If immediateReturn is true then the method returns immediately.ArcMoveController.arc(double, double, boolean)private double turnRate(double radius)
radius - private double radius(double turnRate)
turnRate - public void steer(double turnRate)
arcForward(double radius ) method except it uses
the turnRate parameter do determine the curvature of the
path and therefore has the ability to drive straight. This makes it
useful for line following applications.
The turnRate specifies the sharpness of the turn. Use values
between -200 and +200.
A positive value means that center of the turn is on the left. If the
robot is traveling toward the top of the page the arc looks like this:
).
A negative value means that center of the turn is on the right so the arc
looks this: (.
. In this class, this parameter determines the ratio of inner wheel speed
to outer wheel speed as a percent.
Formula: ratio = 100 - abs(turnRate).
When the ratio is negative, the outer and inner wheels rotate in opposite
directions. Examples of how the formula works:
steer(0) -> inner and outer wheels turn at the same
speed, travel straight
steer(25) -> the inner wheel turns at 75% of the speed
of the outer wheel, turn left
steer(100) -> the inner wheel stops and the outer wheel
is at 100 percent, turn left
steer(200) -> the inner wheel turns at the same speed as
the outer wheel - a zero radius turn.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
steer in interface LineFollowingMoveControllerturnRate - If positive, the left side of the robot is on the inside of
the turn. If negative, the left side is on the outside.public void steerBackward(double turnRate)
steer(double) except that the robot
moves backward instead of forward.steerBackward in interface LineFollowingMoveControllerturnRate - public void steer(double turnRate,
double angle)
arc(double radius , double angle)
method except it uses a ratio of motor speeds to determine the curvature
of the path and therefore has the ability to drive straight. This makes
it useful for line following applications. This method does not return
until the robot has completed moving angle degrees along the
arc.turnRate specifies the sharpness of the turn. Use values
between -200 and +200.steer(double turnRate)
The robot will stop when its heading has changed by the amount of the
angle parameter.
If angle is positive, the robot will move in the direction
that increases its heading (it turns left).
If angle is negative, the robot will move in the directin
that decreases its heading (turns right).
If angle is zero, the robot will not move and the method
returns immediately.
The sign of the turn rate and the sign of the angle together determine if
the robot will move forward or backward. Assuming the robot is heading
toward the top of the page. Then a positive turn rate means the arc looks
like this: ) . If the angle is positive, the robot moves forward
to increase its heading angle. If negative, it moves backward to decrease
the heading.
But if the turn rate is negative, the arc looks like this: ( .So
a positive angle (increase in heading) means the robot moves backwards,
while a negative angle means the robot moves forward to decrease its
heading.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
turnRate - If positive, the left side of the robot is on the inside of
the turn. If negative, the left side is on the outside.angle - The angle through which the robot will rotate. If negative,
the robot will move in the directin that decreases its
heading.public void steer(double turnRate,
double angle,
boolean immediateReturn)
arc(double radius, double angle, boolean immediateReturn) method
except it uses the turnRate() parameter to determine the
curvature of the path and therefore has the ability to drive straight.
This makes it useful for line following applications. This method has the
ability to return immediately by using the immediateReturn
parameter set to true.
The turnRate specifies the sharpness of the turn. Use values
between -200 and +200.
For details about how this parameter works, see
steer(double turnRate)
The robot will stop when its heading has changed by the amount of the
angle parameter.
If angle is positive, the robot will move in the direction
that increases its heading (it turns left).
If angle is negative, the robot will move in the direction
that decreases its heading (turns right).
If angle is zero, the robot will not move and the method
returns immediately.
For more details about this parameter, see
steer(double turnRate, double angle)
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
turnRate - If positive, the left side of the robot is on the inside of
the turn. If negative, the left side is on the outside.angle - The angle through which the robot will rotate. If negative,
robot traces the turning circle backwards.immediateReturn - If immediateReturn is true then the method returns
immediately.void steerPrep(double turnRate)
turnRate - .protected void movementStart()
protected void movementActive()
private void movementStop()
public boolean isMoving()
MoveControllerisMoving in interface MoveControllerprivate void waitComplete()
private void waitForActiveMove()
public boolean isStalled()
public void reset()
public void setMinRadius(double radius)
setMinRadius in interface ArcMoveControllerradius - in degreespublic double getMinRadius()
ArcMoveControllergetMinRadius in interface ArcMoveControllerpublic float getMovementIncrement()
public float getAngleIncrement()
public void addMoveListener(MoveListener m)
MoveProvideraddMoveListener in interface MoveProviderm - the move listenerpublic Move getMovement()
MoveProvidergetMovement in interface MoveProviderpublic double getTurnRate()
public void setAngularAcceleration(double acceleration)
RotateMoveControllerIf acceleration is set during a move it will not be in used for the current move, it will be in effect with the next move.
setAngularAcceleration in interface RotateMoveControlleracceleration - in chosen units/second^2public double getAngularAcceleration()
RotateMoveControllergetAngularAcceleration in interface RotateMoveController