Package lejos.robotics.navigation
Interface ArcMoveController
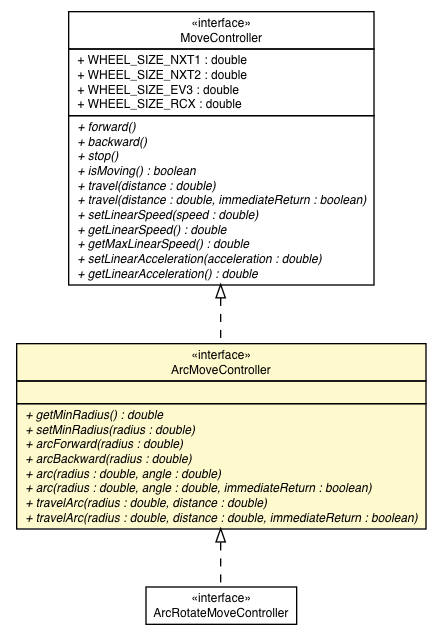
public interface ArcMoveController extends MoveController
WHEEL_SIZE_EV3, WHEEL_SIZE_NXT1, WHEEL_SIZE_NXT2, WHEEL_SIZE_RCX| Modifier and Type | Method and Description |
|---|---|
void |
arc(double radius,
double angle)
Moves the NXT robot along an arc with a specified radius and angle,
after which the robot stops moving.
|
void |
arc(double radius,
double angle,
boolean immediateReturn)
Moves the NXT robot along an arc with a specified radius and angle,
after which the robot stops moving.
|
void |
arcBackward(double radius)
Starts the NXT robot moving backward along an arc with a specified radius.
|
void |
arcForward(double radius)
Starts the NXT robot moving forward along an arc with a specified radius.
|
double |
getMinRadius()
The minimum steering radius this vehicle is capable of when traveling in an arc.
|
void |
setMinRadius(double radius)
Set the radius of the minimum turning circle.
|
void |
travelArc(double radius,
double distance)
Moves the NXT robot a specified distance along an arc of specified radius,
after which the robot stops moving.
|
void |
travelArc(double radius,
double distance,
boolean immediateReturn)
Moves the NXT robot a specified distance along an arc of specified radius,
after which the robot stops moving.
|
backward, forward, getLinearAcceleration, getLinearSpeed, getMaxLinearSpeed, isMoving, setLinearAcceleration, setLinearSpeed, stop, travel, traveladdMoveListener, getMovementdouble getMinRadius()
void setMinRadius(double radius)
radius - the radius in degreesvoid arcForward(double radius)
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.void arcBackward(double radius)
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.void arc(double radius,
double angle)
angle degrees along the arc.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, is zero, the robot rotates in place.
Robot will stop when the degrees it has moved along the arc equals angle.
If angle is positive, the robot will turn to the left (anti-clockwise).
If angle is negative, the robot will turn to the right (clockwise).
If angle is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.angle - The sign of the angle determines the direction of the robot turns: Positive is anti-clockwise, negative is clockwise.travelArc(double, double)void arc(double radius,
double angle,
boolean immediateReturn)
immediateReturn parameter.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, is zero, the robot rotates in place.
The robot will stop when the degrees it has moved along the arc equals angle.
If angle is positive, the robot will turn to the left (anti-clockwise).
If angle is negative, the robot will turn to the right (clockwise).
If angle is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
Note: If you have specified a drift correction in the constructor it will not be applied in this method.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.angle - The sign of the angle determines the direction of the robot turns: Positive is anti-clockwise, negative is clockwise.immediateReturn - If immediateReturn is true then the method returns immediately.travelArc(double, double, boolean)void travelArc(double radius,
double distance)
distance along the arc. The units (inches, cm) for distance
must be the same as the units used for radius.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place
The robot will stop when it has moved along the arc distance units.
If distance is positive, the robot will move travel forwards.
If distance is negative, the robot will move travel backwards.
If distance is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.distance - to travel, in same units as radius. The sign of the distance determines the direction of robot motion. Positive drives the robot forward, negative drives it backward.arc(double, double)void travelArc(double radius,
double distance,
boolean immediateReturn)
immediateReturn parameter.
The units (inches, cm) for distance should be the same as the units used for radius.
If radius is positive, the robot arcs left, and the center of the turning circle is on the left side of the robot.
If radius is negative, the robot arcs right, and the center of the turning circle is on the right side of the robot.
If radius is zero, the robot rotates in place.
The robot will stop when it has moved along the arc distance units.
If distance is positive, the robot will move travel forwards.
If distance is negative, the robot will move travel backwards.
If distance is zero, the robot will not move and the method returns immediately.
Postcondition: Motor speeds are unpredictable.
radius - of the arc path. If positive, the left side of the robot is on the inside of the turn. If negative, the left
side of the robot is on the outside of the turn.distance - to travel, in same units as radius. The sign of the distance determines the direction of robot motion. Positive drives the robot forward, negative drives it backward.immediateReturn - If immediateReturn is true then the method returns immediately.arc(double, double, boolean)