Package lejos.robotics.navigation
Interface NavigationListener
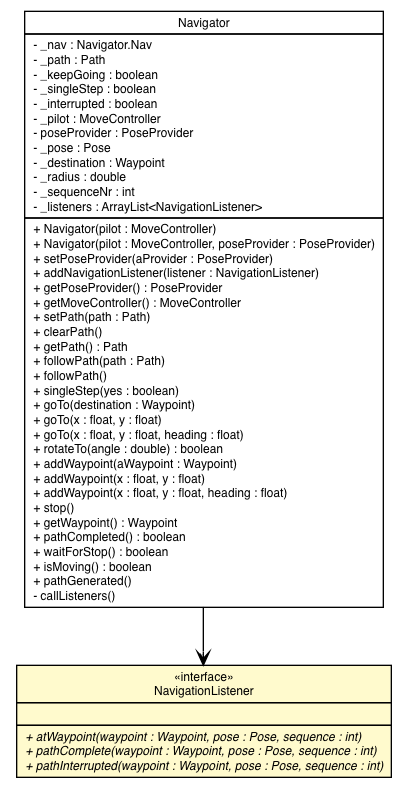
public interface NavigationListener
| Modifier and Type | Method and Description |
|---|---|
void |
atWaypoint(Waypoint waypoint,
Pose pose,
int sequence)
Called when the robot has reached a new Wahpoint.
|
void |
pathComplete(Waypoint waypoint,
Pose pose,
int sequence)
Called when the robot has reached the last Waypoint of the path
|
void |
pathInterrupted(Waypoint waypoint,
Pose pose,
int sequence)
called when the robot has stopped, not at a Waypoint
|
void atWaypoint(Waypoint waypoint, Pose pose, int sequence)
waypoint - where the robotpose - of the robotsequence - of the Waypoint in the pathvoid pathComplete(Waypoint waypoint, Pose pose, int sequence)
waypoint - where the robotpose - of the robotsequence - of the Waypoint in the path