Package lejos.utility
Class GyroDirectionFinder
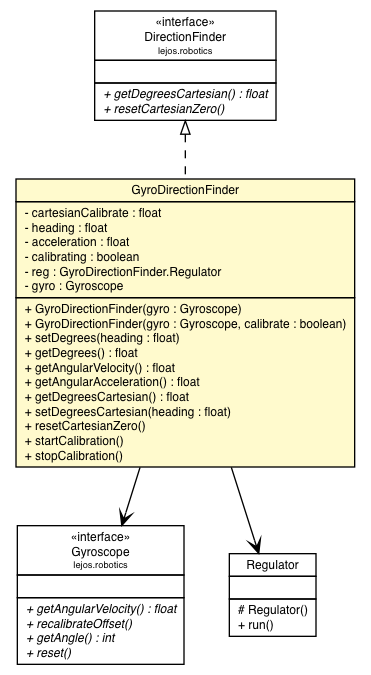
public class GyroDirectionFinder extends java.lang.Object implements DirectionFinder
DirectionFinder interface that integrates repeated rate-of-turn readings from a
gyro sensor
into a continuously updated heading. This class is very similar to the compass sensors,
except that the direction returned does not convey true heading (north, south, etc) but rather
relative heading change since the last time setDegrees() or resetCartesianZero() was called.| Modifier and Type | Class and Description |
|---|---|
private class |
GyroDirectionFinder.Regulator
This is the private thread class that is used to continuously integrate successive readings from the gyro
|
| Modifier and Type | Field and Description |
|---|---|
private float |
acceleration |
private boolean |
calibrating |
private float |
cartesianCalibrate |
private Gyroscope |
gyro |
private float |
heading |
private GyroDirectionFinder.Regulator |
reg |
| Constructor and Description |
|---|
GyroDirectionFinder(Gyroscope gyro)
Creates and initializes a new
GyroDirectionFinder using passed GyroSensor |
GyroDirectionFinder(Gyroscope gyro,
boolean calibrate)
Creates and initializes a new
GyroDirectionFinder using passed GyroSensor and does
the GyroSensor.recalibrateOffset() method. |
| Modifier and Type | Method and Description |
|---|---|
float |
getAngularAcceleration()
Returns the current rate at which the angular velocity is increasing or decreasing in degrees-per-second, per second.
|
float |
getAngularVelocity()
Returns the current rate-of-turn in degrees/second, as read by the
GyroSensor instance passed in the constructor. |
float |
getDegrees()
Returns the directional heading in degrees.
|
float |
getDegreesCartesian()
Returns the current rate-of-turn in degrees, as read by the
GyroSensor. |
void |
resetCartesianZero()
Resets the current heading to zero.
|
void |
setDegrees(float heading)
Resets the current heading to a desired value.
|
void |
setDegreesCartesian(float heading)
Resets the current heading to a desired value.
|
void |
startCalibration()
Find offset/bias of gyro while at rest (ensure it is at rest).
|
void |
stopCalibration()
NO FUNCTIONALITY EQUIVALENT for
GyroSensor so implemented just to satisfy the DirectionFinder interface. |
private float cartesianCalibrate
private float heading
private float acceleration
private boolean calibrating
private GyroDirectionFinder.Regulator reg
private Gyroscope gyro
public GyroDirectionFinder(Gyroscope gyro)
GyroDirectionFinder using passed GyroSensorgyro - a gyro sensor instancepublic GyroDirectionFinder(Gyroscope gyro, boolean calibrate)
GyroDirectionFinder using passed GyroSensor and does
the GyroSensor.recalibrateOffset() method.gyro - A gyro sensor instancepublic void setDegrees(float heading)
getDegrees()public float getDegrees()
resetCartesianZero().setDegrees(float)public float getAngularVelocity()
GyroSensor instance passed in the constructor.public float getAngularAcceleration()
public float getDegreesCartesian()
GyroSensor.getDegreesCartesian in interface DirectionFinderpublic void setDegreesCartesian(float heading)
public void resetCartesianZero()
resetCartesianZero in interface DirectionFinderpublic void startCalibration()
recalibrateOffset() method of
the GyroSensor instance passed in the constructor. This takes 3 seconds.startCalibration in interface Calibratepublic void stopCalibration()
GyroSensor so implemented just to satisfy the DirectionFinder interface.
Does nothing.stopCalibration in interface Calibrate