Package lejos.robotics.mapping
Interface RangeMap
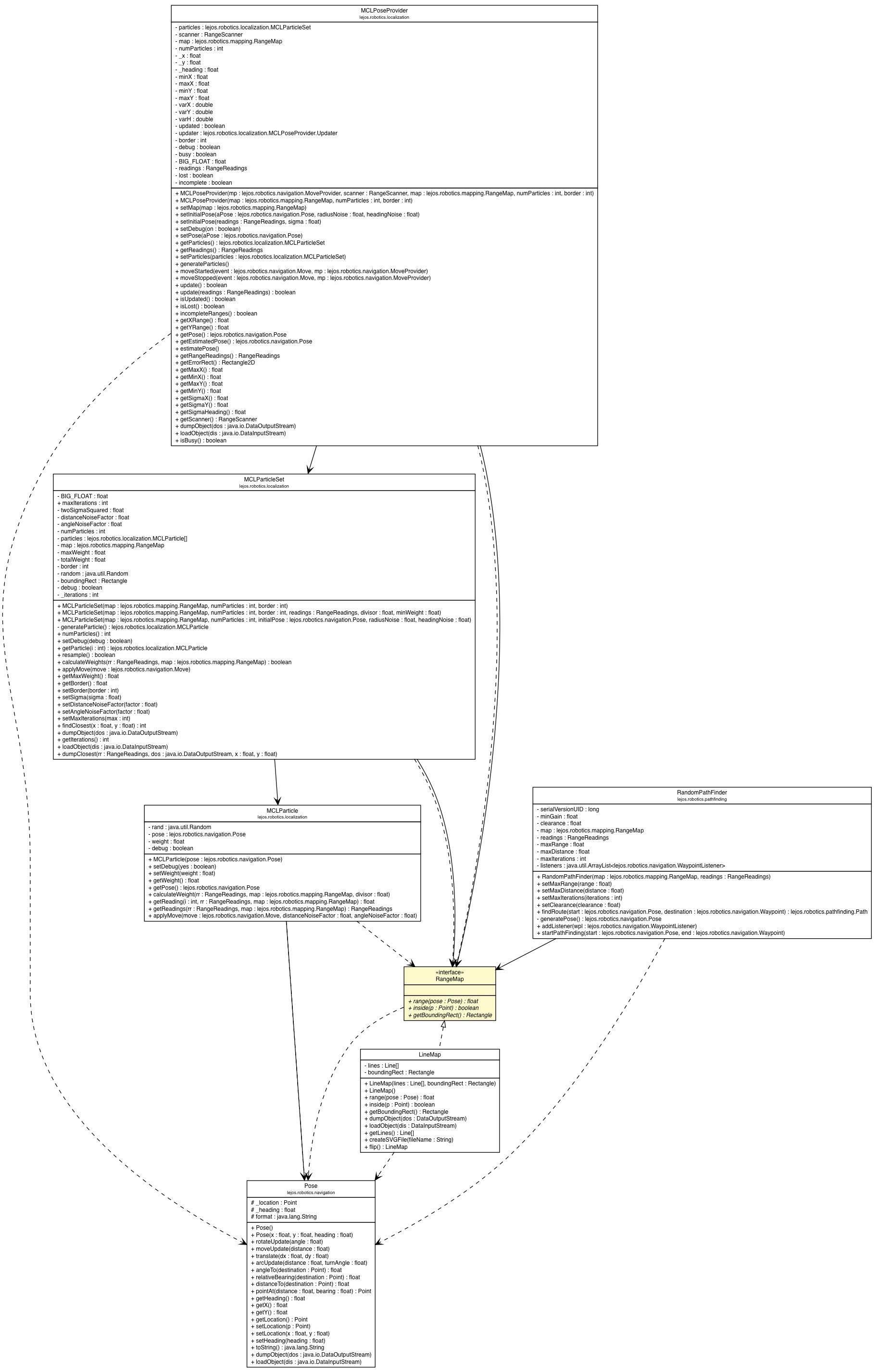
public interface RangeMap
| Modifier and Type | Method and Description |
|---|---|
Rectangle |
getBoundingRect()
Get the bounding rectangle for the mapped area
|
boolean |
inside(Point p)
Test if a point is within the mapped area
|
float |
range(Pose pose)
The the range to the nearest wall (or other feature)
|
float range(Pose pose)
pose - the pose of the robotboolean inside(Point p)
p - the pointRectangle getBoundingRect()