ev3dev.actuators.lego.motors
Class EV3MediumRegulatedMotor
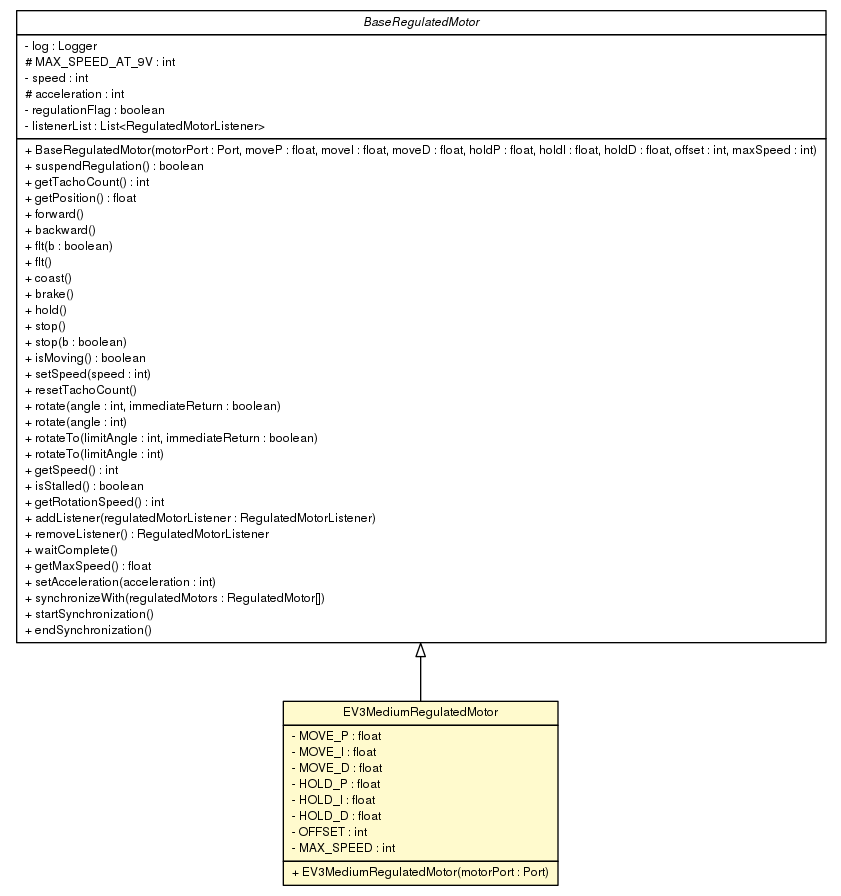
public class EV3MediumRegulatedMotor extends BaseRegulatedMotor
| Modifier and Type | Field and Description |
|---|---|
private static float |
HOLD_D |
private static float |
HOLD_I |
private static float |
HOLD_P |
private static int |
MAX_SPEED |
private static float |
MOVE_D |
private static float |
MOVE_I |
private static float |
MOVE_P |
private static int |
OFFSET |
acceleration, MAX_SPEED_AT_9VAUTO_MODE, BRAKE, COAST, COMMAND, DC_MOTOR, DUTY_CYCLE, HOLD, POLARITY, POLARITY_INVERSED, POLARITY_NORMAL, POSITION, POSITION_SP, POWER, RESET, RUN_DIRECT, RUN_FOREVER, RUN_TO_ABS_POS, RUN_TO_REL_POS, SPEED, STATE, STATE_RUNNING, STATE_STALLED, STOP, STOP_COMMAND, TACHO_MOTORADDRESS, CURRENT_PLATFORM, DEVICE, ev3DevProperties, LEGO_PORT, LEGO_SENSOR, MODE, PATH_DEVICE| Constructor and Description |
|---|
EV3MediumRegulatedMotor(Port motorPort)
Constructor
|
addListener, backward, brake, coast, endSynchronization, flt, flt, forward, getMaxSpeed, getPosition, getRotationSpeed, getSpeed, getTachoCount, hold, isMoving, isStalled, removeListener, resetTachoCount, rotate, rotate, rotateTo, rotateTo, setAcceleration, setSpeed, startSynchronization, stop, stop, suspendRegulation, synchronizeWith, waitCompletedetect, getIntegerAttribute, getStringAttribute, setIntegerAttribute, setStringAttributeprivate static final float MOVE_P
private static final float MOVE_I
private static final float MOVE_D
private static final float HOLD_P
private static final float HOLD_I
private static final float HOLD_D
private static final int OFFSET
private static final int MAX_SPEED