ev3dev.actuators.lego.motors
Class BasicMotor
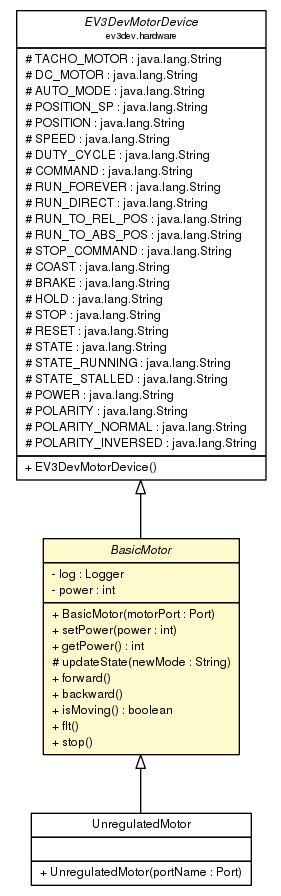
public abstract class BasicMotor extends EV3DevMotorDevice
| Modifier and Type | Field and Description |
|---|---|
private static Logger |
log |
private int |
power |
AUTO_MODE, BRAKE, COAST, COMMAND, DC_MOTOR, DUTY_CYCLE, HOLD, POLARITY, POLARITY_INVERSED, POLARITY_NORMAL, POSITION, POSITION_SP, POWER, RESET, RUN_DIRECT, RUN_FOREVER, RUN_TO_ABS_POS, RUN_TO_REL_POS, SPEED, STATE, STATE_RUNNING, STATE_STALLED, STOP, STOP_COMMAND, TACHO_MOTORADDRESS, CURRENT_PLATFORM, DEVICE, ev3DevProperties, LEGO_PORT, LEGO_SENSOR, MODE, PATH_DEVICE| Constructor and Description |
|---|
BasicMotor(Port motorPort)
Constructor
|
| Modifier and Type | Method and Description |
|---|---|
void |
backward()
Causes motors to rotate backwards.
|
void |
flt()
Causes motors to float.
|
void |
forward()
Causes motors to rotate forward.
|
int |
getPower()
Get power
|
boolean |
isMoving()
Returns true iff the motors is in motion.
|
void |
setPower(int power)
Set power
|
void |
stop()
Causes motors to stop, pretty much
instantaneously.
|
protected void |
updateState(java.lang.String newMode)
Update the internal state tracking the motor direction
|
detect, getIntegerAttribute, getStringAttribute, setIntegerAttribute, setStringAttributepublic BasicMotor(Port motorPort)
motorPort - portpublic void setPower(int power)
power - new motors power 0-100public int getPower()
protected void updateState(java.lang.String newMode)
newMode - modepublic void forward()
public void backward()
public boolean isMoving()
public void flt()
public void stop()