Package lejos.robotics.pathfinding
Interface SearchAlgorithm
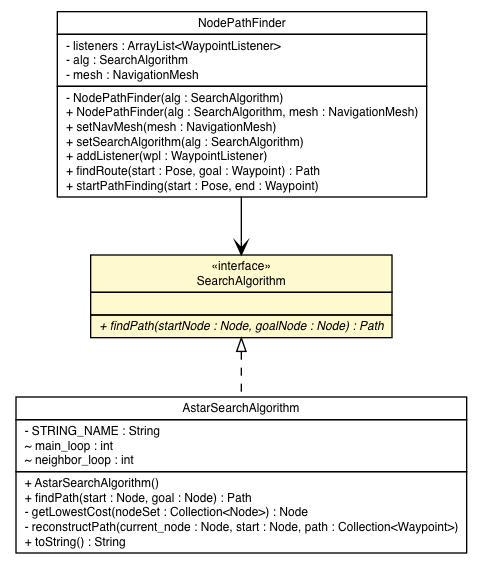
public interface SearchAlgorithm
Object.toString()| Modifier and Type | Method and Description |
|---|---|
Path |
findPath(Node startNode,
Node goalNode)
Method accepts a start node and a goal node, and returns a path consisting of a collection of waypoints which
includes the startNode coordinates as the first waypoint, and the goal node coordinates as the final waypoint.
|
Path findPath(Node startNode, Node goalNode)
startNode - goalNode -