Package lejos.robotics.objectdetection
Class RangeFeature
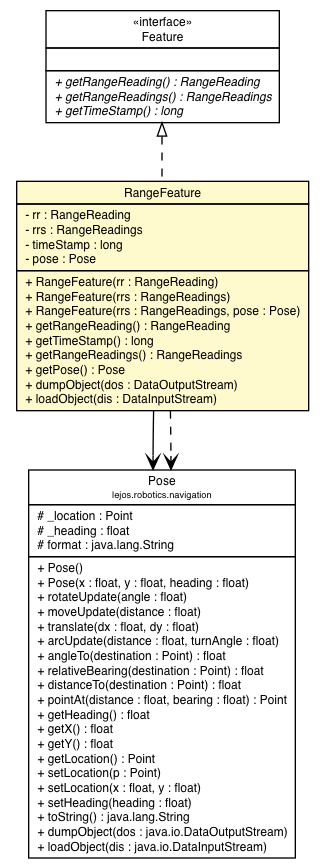
public class RangeFeature extends java.lang.Object implements Feature
This class is a basic data container for information retrieved about an object detected by
sensors. The RangeFeature contains only the most basic range information of a detected object, which
is RangeReading. The RangeReading contains range and angle data relative to the robot.
It can be extended to include more information, such as color. For example, a ColorFeature would rely on a ColorFeatureDetector to supply color information and range. The ColorFeatureDetector could extend FeatureDetector and accept a camera in the constructor to identify color of a detected object. This type of class would be useful to allow soccer robots to identify team-mates, the soccer ball, and the different goals.
| Modifier and Type | Field and Description |
|---|---|
private Pose |
pose |
private RangeReading |
rr |
private RangeReadings |
rrs |
private long |
timeStamp |
| Constructor and Description |
|---|
RangeFeature(RangeReading rr)
Creates a RangeFeature containing a single RangeReading.
|
RangeFeature(RangeReadings rrs)
Creates a RangeFeature containing multiple RangeReadings.
|
RangeFeature(RangeReadings rrs,
Pose pose)
Creates a RangeFeature containing multiple RangeReadings.
|
| Modifier and Type | Method and Description |
|---|---|
void |
dumpObject(java.io.DataOutputStream dos) |
Pose |
getPose() |
RangeReading |
getRangeReading()
Returns the RangeReading for this particular detected feature.
|
RangeReadings |
getRangeReadings()
Returns a set of RangeReadings for a number of detected objects.
|
long |
getTimeStamp()
The time-stamp is the recorded system time when the range reading was taken.
|
void |
loadObject(java.io.DataInputStream dis) |
private RangeReading rr
private RangeReadings rrs
private long timeStamp
private Pose pose
public RangeFeature(RangeReading rr)
getRangeReadings()
method is subsequently called, it will return a RangeReadings set containing only one RangeReading (rr).rr - The RangeReading.public RangeFeature(RangeReadings rrs)
getRangeReading() method
will return the RangeReading with the smallest range.rrs - A (@link RangeReadings} object containing a set of RangeReading values.public RangeFeature(RangeReadings rrs,
Pose pose)
getRangeReading() method
will return the RangeReading with the smallest range.rrs - A (@link RangeReadings} object containing a set of RangeReading values.pose - the pose of the robot when the reading was takenpublic RangeReading getRangeReading()
FeaturegetRangeReading in interface Featurepublic long getTimeStamp()
FeaturegetTimeStamp in interface Featurepublic RangeReadings getRangeReadings()
FeaturegetRangeReadings in interface Featurepublic Pose getPose()
public void dumpObject(java.io.DataOutputStream dos)
throws java.io.IOException
java.io.IOExceptionpublic void loadObject(java.io.DataInputStream dis)
throws java.io.IOException
java.io.IOException