Package lejos.robotics.localization
Class CompassPoseProvider
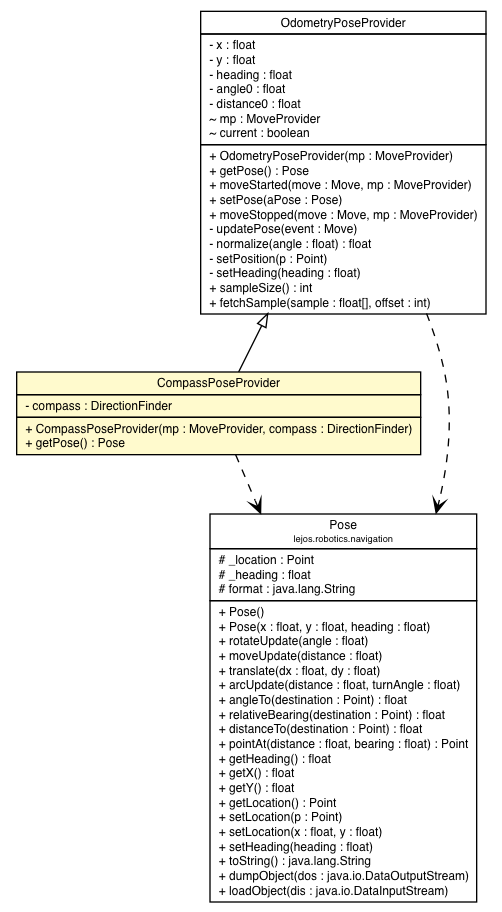
public class CompassPoseProvider extends OdometryPoseProvider
| Modifier and Type | Field and Description |
|---|---|
private DirectionFinder |
compass |
current, mp| Constructor and Description |
|---|
CompassPoseProvider(MoveProvider mp,
DirectionFinder compass) |
| Modifier and Type | Method and Description |
|---|---|
Pose |
getPose()
returns a new pose that represents the current location and heading of the robot.
|
fetchSample, moveStarted, moveStopped, sampleSize, setPosepublic CompassPoseProvider(MoveProvider mp, DirectionFinder compass)
public Pose getPose()
OdometryPoseProvidergetPose in interface PoseProvidergetPose in class OdometryPoseProvider