1. Introduction
Any Robot is a combination of Software & Hardware.
The Architecture of any robot is based on the following components:
-
Control System
-
Sensors
-
Actuators
-
Power supply
1.1. Control System
The pure definition of a Control system is:
| "A control system manages, commands, directs or regulates the behaviour of other devices or systems." |
In a Mindstorms context, the Control System is the Brick we use to create Robots.
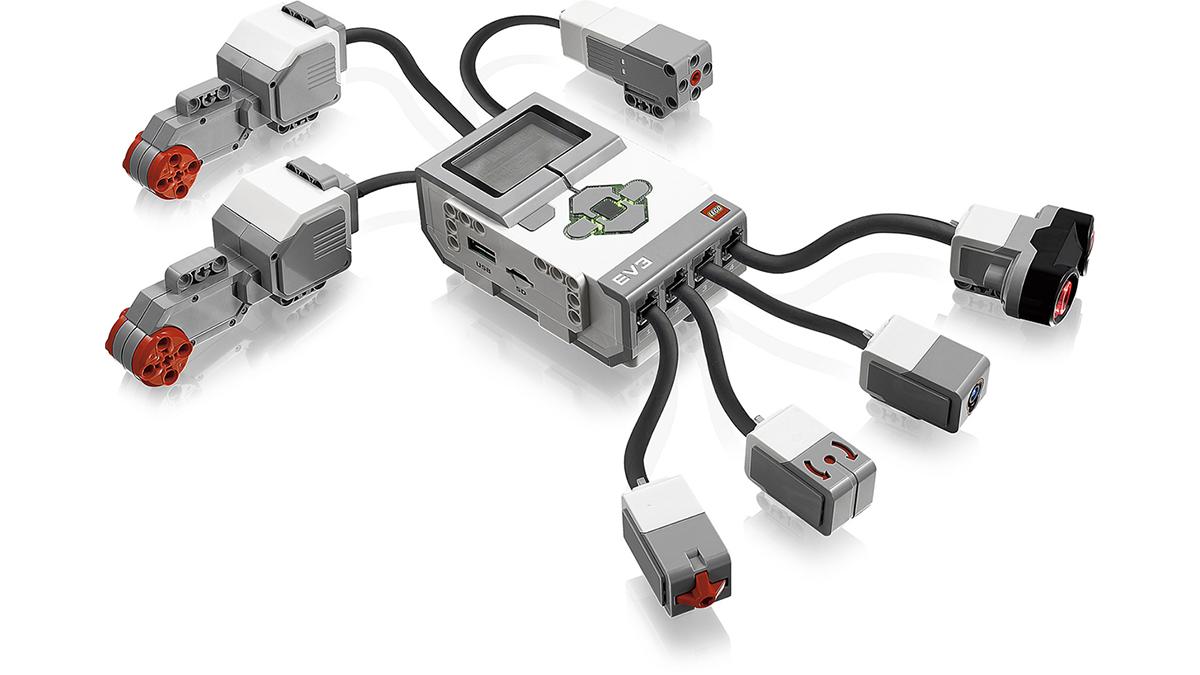
In the third generation of Lego Mindstorms, it is possible to use Raspberry Pi to manage Sensors & Actuators from Lego Mindstorms ecosystem:

1.2. Sensors
Sensors measure a physical quantity, and convert it into a usable signal for your control systen. When you are designing the robot it is important to choose the correct sensors to enable it to be aware of its environment and perform the tasks required.
In a Mindstorms context, a Sensor is the EV3 IR Sensor which is able to detect objects and detect the EV3 Beacon.

1.3. Actuators
An "actuator” can be defined as a device that converts energy (in robotics, that energy tends to be electrical) into physical motion or a determinated output like a visualization in a Display or the generation of a Sound.
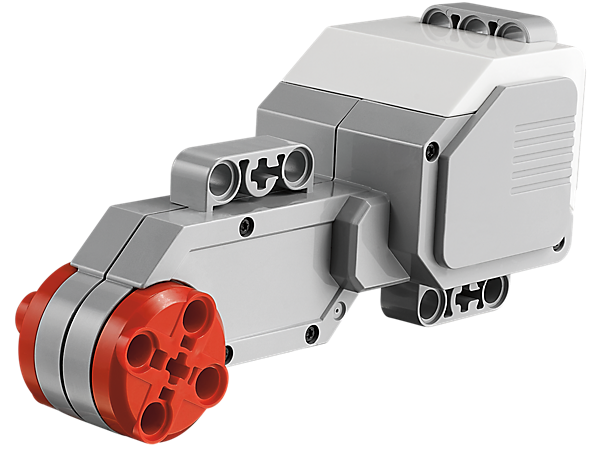
In a Mindstorms context, an actuator is the EV3 Large Motor:
1.4. Power supply
An electric battery is a device consisting of one or more electrochemical cells with external connections provided to power electrical devices.
In a Mindstorms context, one example about Battery is the rechargeable EV3 Battery:
