1. Introduction
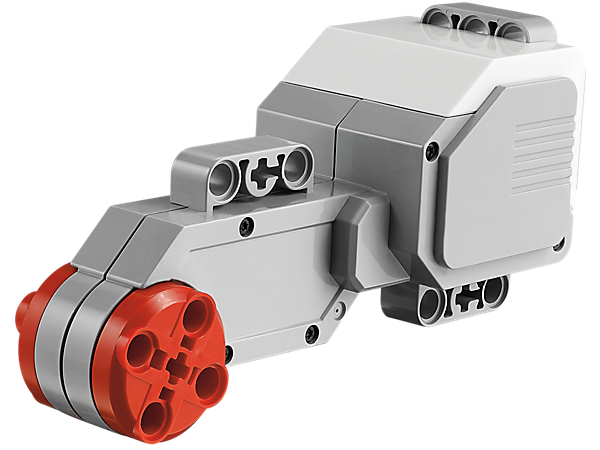
1.1. EV3 Large Motor
1.2. EV3 Medium Motor

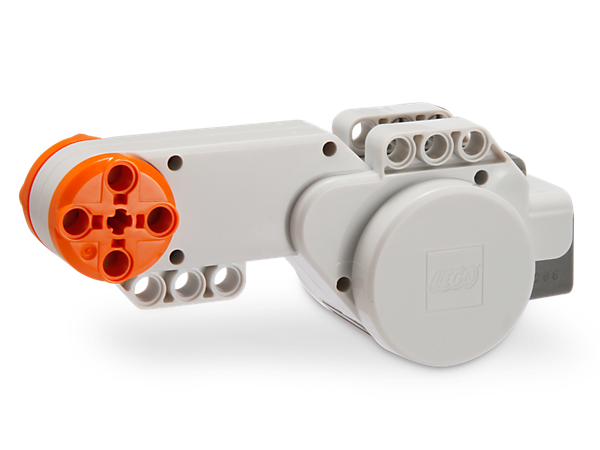
1.3. NXT Motor
2. How to use the regulated motor
2.1. Move a motor
package ev3dev.actuators.lego.motors;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class LargeMotorDemo {
public static void main(String[] args) throws InterruptedException {
System.out.println("Starting motors on A");
final EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
mA.setSpeed(500);
mA.brake();
mA.forward();
System.out.println(String.format("Large Motor is moving: %s at speed %d", mA.isMoving(), mA.getSpeed()));
Delay.msDelay(2000);
mA.stop();
System.out.println("Stopped motors");
}
}2.2. Forward & Backward
package ev3dev.actuators.lego.motors;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class LargeMotorDemo2 {
public static void main(String[] args) throws InterruptedException {
System.out.println("Starting motors on A");
final EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
mA.setSpeed(500);
mA.brake();
System.out.println("Forward");
mA.forward();
System.out.println("Large Motor is moving: " + mA.isMoving() + " at speed {}" + mA.getSpeed());
Delay.msDelay(2000);
mA.stop();
System.out.println("Stop");
System.out.println("Backward");
mA.backward();
System.out.println("Large Motor is moving: " + mA.isMoving() + " at speed {}" + mA.getSpeed());
Delay.msDelay(2000);
System.out.println("Stop");
mA.stop();
System.out.println("Forward");
mA.forward();
Delay.msDelay(2000);
mA.stop();
System.out.println("Stop");
}
}2.3. Test the different stop modes
package ev3dev.actuators.lego.motors;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class LargeMotorStopModesExample {
public static void main(String[] args) throws InterruptedException {
System.out.println("Starting motors on A");
final EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
mA.setSpeed(500);
System.out.println("Testing brake stop mode");
mA.brake();
mA.forward();
System.out.println(String.format("Large Motor is moving: %s at speed %d", mA.isMoving(), mA.getSpeed()));
Delay.msDelay(2000);
mA.stop();
Delay.msDelay(2000);
System.out.println("Testing hold stop mode");
mA.hold();
mA.forward();
System.out.println(String.format("Large Motor is moving: %s at speed %d", mA.isMoving(), mA.getSpeed()));
Delay.msDelay(2000);
mA.stop();
Delay.msDelay(2000);
System.out.println("Testing coast stop mode");
mA.coast();
mA.forward();
System.out.println(String.format("Large Motor is moving: %s at speed %d", mA.isMoving(), mA.getSpeed()));
Delay.msDelay(2000);
mA.stop();
System.out.println("Stopped motors");
}
}2.4. Multiple motors
package ev3dev.actuators.lego.motors;
import ev3dev.hardware.EV3DevPlatforms;
import ev3dev.sensors.Battery;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class MultipleMotorsDemo extends EV3DevPlatforms {
public static void main(String[] args) throws InterruptedException {
MultipleMotorsDemo example = new MultipleMotorsDemo();
System.out.println("Starting motor on A");
final EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
System.out.println("Starting motor on B");
final EV3LargeRegulatedMotor mB = new EV3LargeRegulatedMotor(MotorPort.B);
//To Stop the motor in case of pkill java for example
Runtime.getRuntime().addShutdownHook(new Thread(new Runnable() {
public void run() {
mA.stop();
mB.stop();
System.out.println(Battery.getInstance().getVoltage());
}
}));
mA.brake();
mB.brake();
mA.setSpeed(100);
mB.setSpeed(100);
mA.forward();
mB.forward();
Delay.msDelay(4000);
mA.stop();
mB.stop();
System.out.println("Stopped motors");
}
}2.5. Motor events
package ev3dev.actuators.lego.motors;
import lejos.hardware.port.MotorPort;
import lejos.robotics.RegulatedMotor;
import lejos.robotics.RegulatedMotorListener;
import lejos.utility.Delay;
public class MotorEventTest {
public static void main(String[] args) {
System.out.println("Testing events with Motors");
// Listener to stop motors if they get stalled
final RegulatedMotorListener listener = new RegulatedMotorListener() {
@Override
public void rotationStarted(
final RegulatedMotor motor,
final int tachoCount,
final boolean stalled,
final long timeStamp) {
System.out.println("Started");
}
@Override
public void rotationStopped(
final RegulatedMotor motor,
final int tachoCount,
final boolean stalled,
final long timeStamp) {
System.out.println("Stopped");
}
};
final RegulatedMotor mA = new NXTRegulatedMotor(MotorPort.A);
mA.addListener(listener);
mA.forward();
Delay.msDelay(500);
mA.stop();
}
}2.6. Rotating a motor
package ev3dev.actuators.lego.motors;
import ev3dev.actuators.Sound;
import ev3dev.hardware.EV3DevPlatform;
import ev3dev.hardware.EV3DevPlatforms;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class RegulatedMotorRotateDemo extends EV3DevPlatforms {
public static void main(String[] args) {
RegulatedMotorRotateDemo example = new RegulatedMotorRotateDemo();
Sound sound = Sound.getInstance();
final int degreesToTurn = 90;
final EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
mA.resetTachoCount();
mA.setSpeed(100);
if(example.getPlatform().equals(EV3DevPlatform.EV3BRICK)) {
mA.brake();
sound.beep();
System.out.println("" + mA.getTachoCount());
mA.rotate(degreesToTurn);
sound.beep();
Delay.msDelay(1000);
System.out.println("" + mA.getTachoCount());
mA.rotate(degreesToTurn);
sound.beep();
Delay.msDelay(1000);
System.out.println("" + mA.getTachoCount());
mA.rotate(degreesToTurn);
sound.beep();
Delay.msDelay(1000);
System.out.println("" + mA.getTachoCount());
mA.rotate(degreesToTurn);
sound.beep();
Delay.msDelay(1000);
System.out.println("" + mA.getTachoCount());
} else {
System.out.println("This feature is exclusive of EV3 Brick with accuracy");
}
}
}2.7. Rotating to a specific angle
package ev3dev.actuators.lego.motors;
import ev3dev.actuators.Sound;
import ev3dev.hardware.EV3DevPlatform;
import ev3dev.hardware.EV3DevPlatforms;
import lejos.hardware.port.MotorPort;
import lejos.utility.Delay;
public class RegulatedMotorRotateToDemo extends EV3DevPlatforms {
public static void main(String[] args) {
RegulatedMotorRotateToDemo example = new RegulatedMotorRotateToDemo();
Sound sound = Sound.getInstance();
final int degreesToTurn = 90;
int currentDegrees = 0;
EV3LargeRegulatedMotor mA = new EV3LargeRegulatedMotor(MotorPort.A);
mA.resetTachoCount();
mA.setSpeed(100);
if(example.getPlatform().equals(EV3DevPlatform.EV3BRICK)) {
mA.brake();
System.out.println("" + mA.getTachoCount());
currentDegrees += degreesToTurn;
System.out.println("" + currentDegrees);
mA.rotateTo(currentDegrees);
sound.beep();
Delay.msDelay(1000);
System.out.println("" + mA.getTachoCount());
currentDegrees += degreesToTurn;
System.out.println("" + currentDegrees);
mA.rotateTo(currentDegrees);
sound.beep();
Delay.msDelay(1000);
} else {
System.out.println("This feature is exclusive of EV3 Brick with accuracy");
}
}
}