lejos.robotics
Interface BaseMotor
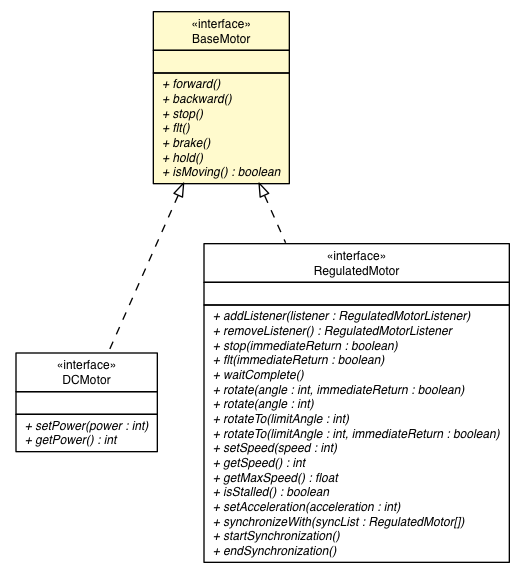
public interface BaseMotor
| Modifier and Type | Method and Description |
|---|---|
void |
backward()
Causes motors to rotate backwards until
stop() or flt() is called. |
void |
brake()
Removes power from the motor and creates a passive electrical load.
|
void |
flt()
Motor loses all power, causing the rotor to float freely to a stop.
|
void |
forward()
Causes motors to rotate forward until
stop() or flt() is called. |
void |
hold()
Causes the motor to actively try to hold the current position.
|
boolean |
isMoving()
Return
true if the motors is moving. |
void |
stop()
Causes motors to stop immediately.
|
void forward()
stop() or flt() is called.void backward()
stop() or flt() is called.void stop()
void flt()
void brake()
void hold()
boolean isMoving()
true if the motors is moving.true if the motors is currently in motion, false if stopped.